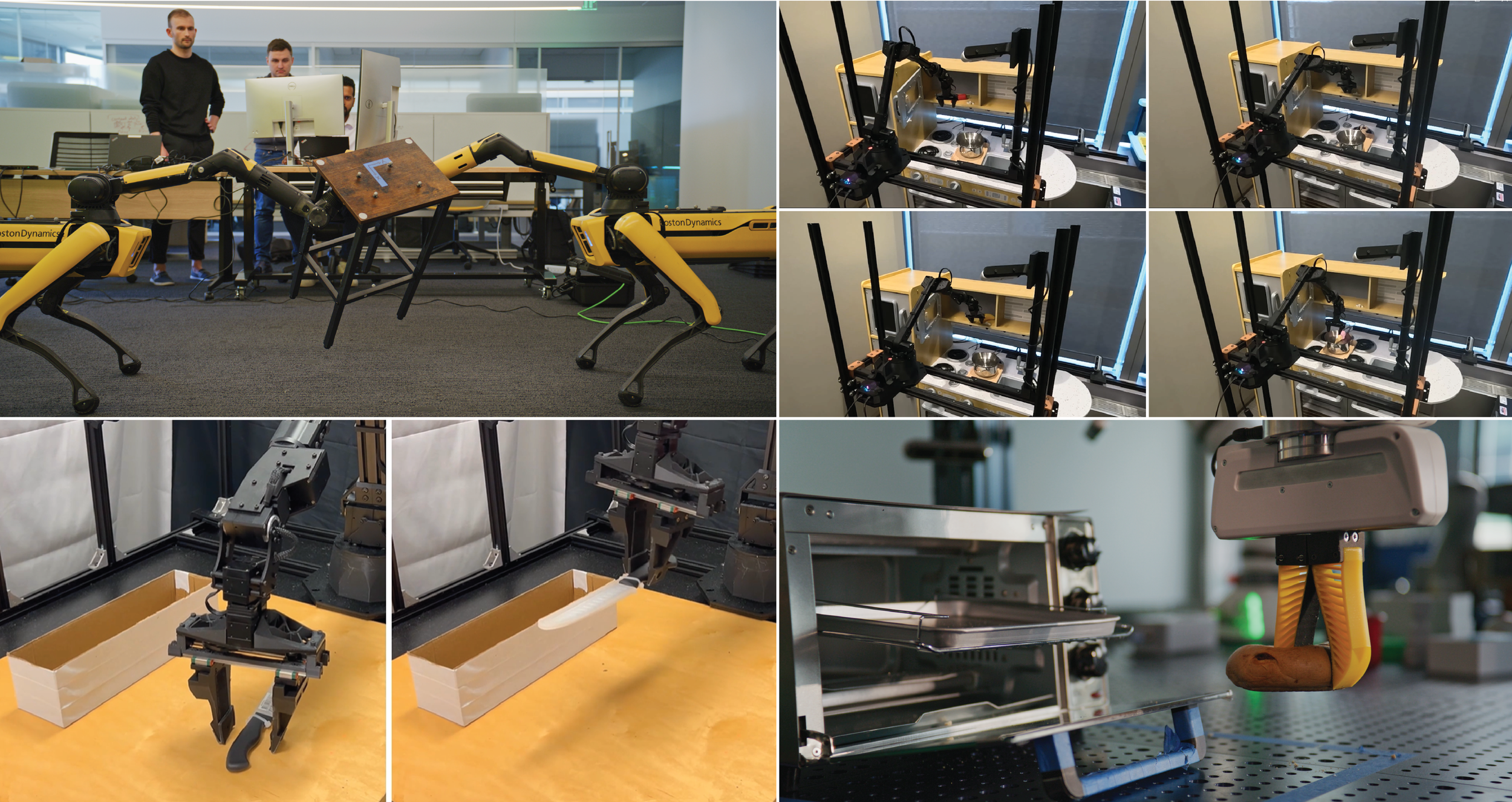
We present a fully autonomous real-world RL framework for mobile manipulation that can learn policies without extensive instrumentation or human supervision.
Introducing the Robotics and AI Institute, formerly known as The AI Institute.
Introducing the Robotics and AI Institute, formerly known as The AI Institute.
By Topic:
By Type:
We present a fully autonomous real-world RL framework for mobile manipulation that can learn policies without extensive instrumentation or human supervision.
The Robotics and AI Institute aims to accelerate robotics and artificial intelligence research by bringing together top talent and the best elements of industry and...
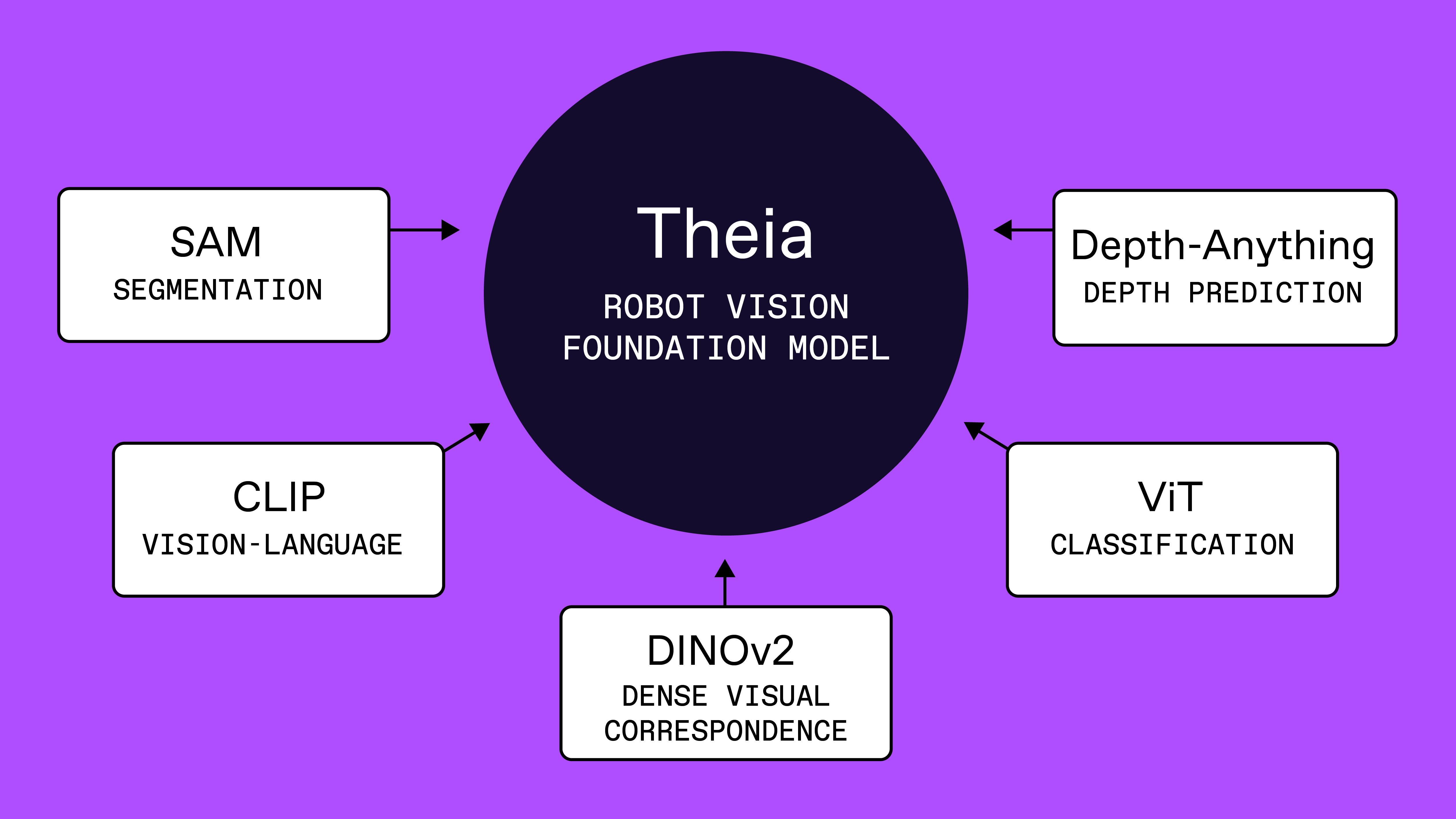
Introducing Theia, a vision foundation model for robotics developed by researchers at the Institute.
The annual Conference on Robot Learning (CoRL) takes place this week, November 6-9 in Munich, Germany. Read on to learn more about our accepted publications.
Robotic manipulation is challenging and data-driven approaches typically require large amounts of data or expert demonstrations. Therefore, we introduce a motion planner for dexterous and...
Diffusion-based policies have shown remarkable capability in executing complex robotic manipulation tasks but lack explicit characterization of geometry and semantics, which often limits their ability...
Scene representation is a crucial design choice in robotic manipulation systems. An ideal representation is expected to be 3D, dynamic, and semantic to meet the...
Recent work has shown diffusion models are an effective approach to learning the multimodal distributions arising from demonstration data in behavior cloning.
Many approaches to robot learning begin by inferring a reward function from a set of human demonstrations. To learn a good reward, it is necessary...
Vision-based robot policy learning, which maps visual inputs to actions, necessitates a holistic understanding of diverse visual tasks beyond single-task needs like classification or segmentation.
A look at the last couple of months, including new dexterity tasks, gait training, bigger jumps, and more.
Recent advancements in physics-based character animation leverage deep learning to generate agile and natural motion, enabling characters to execute movements such as backflips, boxing, and...