We present a fully autonomous real-world RL framework for mobile manipulation that can learn policies without extensive instrumentation or human supervision.
Introducing the Robotics and AI Institute, formerly known as The AI Institute.
Introducing the Robotics and AI Institute, formerly known as The AI Institute.
We aim to solve the most important and fundamental challenges in robotics and AI.
_new-min")
-min")
_new_square-min")
_square-min")
Our Collaborators


If robots are smart enough, we won’t need a fleet of programmers every time a robot needs to do a new task. The robot will understand what it sees, determine how to navigate the space, and figure out what tasks it needs to perform.
Although not every human being is an athlete, we all possess high levels of athletic intelligence. Our work addresses capabilities of robots that physically move in the world, including their mobility, navigation, and dexterity.
Today’s robots are no match to human capabilities, and both hardware and software limitations play a part in that. As we advance robot intelligence, we also need to develop next-level hardware to power their new behaviors.
As we design future generations of robots, we’re also exploring key questions related to their impact on society. We aim to provide data for evidence-based societal choices about the design, integration, and regulation of robotics and AI.
We present a fully autonomous real-world RL framework for mobile manipulation that can learn policies without extensive instrumentation or human supervision.
The Robotics and AI Institute aims to accelerate robotics and artificial intelligence research by bringing together top talent and the best elements of industry and...
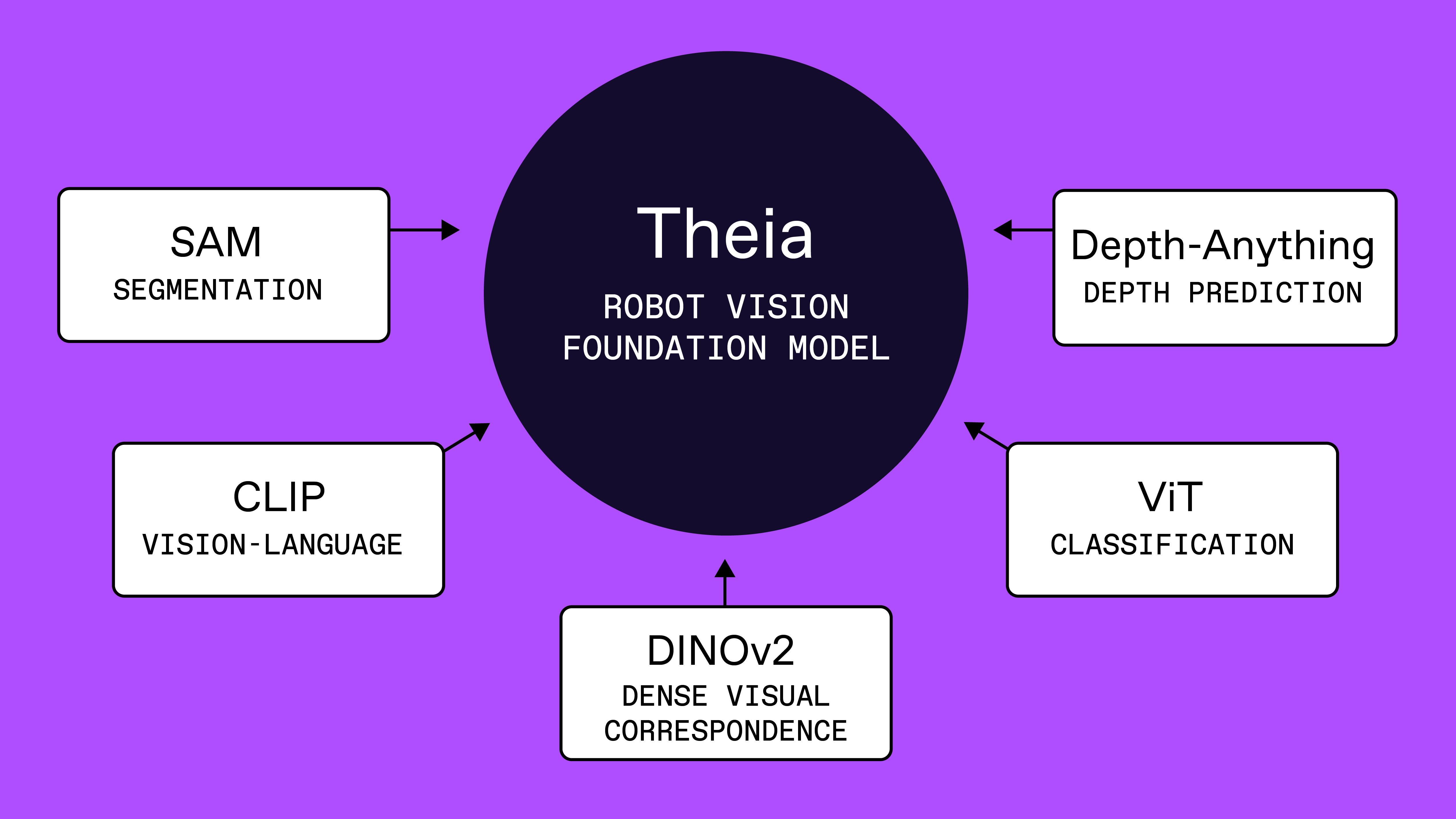
Introducing Theia, a vision foundation model for robotics developed by researchers at the Institute.


We’re hiring researchers and engineers at all levels.